Differenciálható és neurális fizikai szimuláció
Konzulens:
Dr. Vaitkus Márton
Tárgy:
Önálló laboratórium 1 - Egészségügyi mérnök, MSc Eü.
Önálló laboratórium 2 - Egészségügyi mérnök, MSc Eü.
Önálló laboratórium 1 - Irányító és látórendszerek MSc. főspec.
Önálló laboratórium 1 - Vizuális informatika MSc. főspec.
Önálló laboratórium 2 - Irányító és látórendszerek MSc. főspec.
Önálló laboratórium 2 - Vizuális informatika MSc. főspec.
Önálló laboratórium - Szoftverfejlesztés és rendszertervezés specializáció, BSc Info.
Önálló laboratórium - Irányítórendszerek ágazat, BSc Vill.
Projektfeladat mechatronikusoknak
Önálló laboratórium 2 - Egészségügyi mérnök, MSc Eü.
Önálló laboratórium 1 - Irányító és látórendszerek MSc. főspec.
Önálló laboratórium 1 - Vizuális informatika MSc. főspec.
Önálló laboratórium 2 - Irányító és látórendszerek MSc. főspec.
Önálló laboratórium 2 - Vizuális informatika MSc. főspec.
Önálló laboratórium - Szoftverfejlesztés és rendszertervezés specializáció, BSc Info.
Önálló laboratórium - Irányítórendszerek ágazat, BSc Vill.
Projektfeladat mechatronikusoknak
Hallgatói létszám:
2
Folytatás:
Szakdolgozat / Diplomaterv
PhD
TDK dolgozat
PhD
TDK dolgozat
Leírás:
Fizikai rendszerek optimális irányítása és identifikációja régóta kutatott, a mérnöki gyakorlat szempontjából nagy jelentőséggel bíró problémák, melyek megoldását általában valamilyen optimalizációs feladatra vezethetjük vissza. Szintén fontos szerepet játszik a gyakorlatban a fizikai rendszerek számítógépes szimulációja. Az elmúlt években két fontos, újszerű kutatási irány is komoly népszerűségre kezdett szert tenni a szakemberek körében.

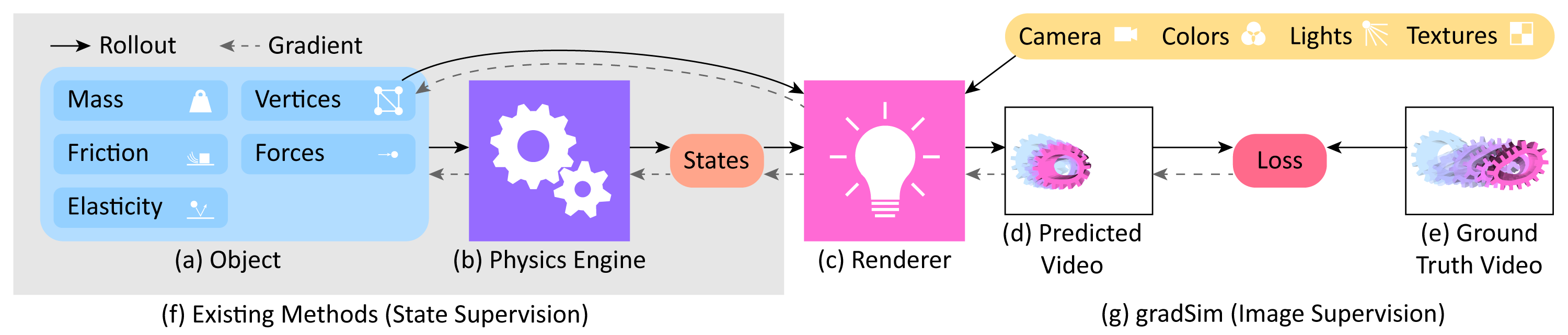
Egyrészt, a neurális hálók ("deep learning") fejlődésével természetesen adódik, hogy irányítási, identifikációs, vagy akár szimulációs feladatokra is felhasználjuk őket. A neurális hálók betanításához használt "backpropagation" algoritmus azonban lényegében egy bonyolult függvény-kompozíció automatikus differenciálásának felel meg, amit neurális hálók helyett bármilyen más komplex számítási folyamatra is alkalmazni lehetne, így pl. a fizikai szimulációt végző algoritmusokra is. Ezáltal lehetséges volna optimális irányítási, vagy identifikációs feladatokban felmerülő optimalizáció során a szimulációs eljáráson keresztül "differenciálni" egy iteratív optimalizációs módszer (pl. gradient descent) alkalmazásához. Akár bonyolult, rugalmasságtani fizikát szimuláló algoritmusok (pl. végeselemek, vagy az anyagpontok módszere) is könnyedén differenciálhatóvá tehetők [1][2] és az optimalizációt akár képek alapján is végezhetjük!
Továbbá a differenciálható szimuláció, akár neurális hálókkal is kombinálható [3]!
A hallgató feladatai:
- Ismerkedjen meg a differenciálható szimuláció elméleti és gyakorlati alapjaival [1][2]. Python alatt pl. a Taichi szimulációs könyvtár ajánlott.
- Implementáljon valamilyen fizikai rendszernek (merev, vagy rugalmas test, robot, jármű, folyadék) megfelelő differenciálható szimulációs eljárást, amin keresztül lehetővé válik a rendszert irányítani és fizikai paramétereit identifikálni.
- Vizsgálja meg a képek alapján való irányítás és identifikálás vagy a neurális hálózatok alkalmazásának [3] lehetőségeit.
Hivatkozások:
[1] Hu, Yuanming: Differentiable Physical Simulation and AI. NeurIPS 2020 DiffCVGP workshop
[2] Coros et al: Differentiable Simulation. SIGGRAPH 2021 Course (egyetemi IP-ről videó is letölthető)
[3] Thuerey et al.: Physics-based Deep Learning.
Ajánlott előismeretek: Téma iránti érdeklődés. Alapismeretek és/vagy tapasztalatok a szabályozástechnika és/vagy neurális hálók és/vagy a fizikai szimuláció területén. Python nyelv ismerete ajánlott.